Hey all, figured it’s about time I detail the project I was selected to recive a mainboard for. I’m a member of the University of Michigan Dearborn’s Intelligent Systems Club, where we regularly deal with mobile robotics. This coming year, we will be creating an autonomous go-kart to compete in evgrandprix, where our kart will be attempting the fastest time trial without any human intervention.
While this is cool and all, we of first have to get our feet wet with programming car-like vehicles, which is quite a different experence due to their Ackermann steering setup. Learning on the $8000 kart sounded unwise, so we decided upon another route…
The TinyKart™️
As it turns out, RC cars are quite hackable. This makes them a great target for a DIY automous vehicle on a budget. We arn’t the first to have this idea of course, MIT racecar and F1/10 are both well established autonomous RC car programs. What we aim to do then is to create a much more freeform and lower budget equivelent for (for now) internal use, which we hope will provide a strong learning platform for new and old members alike.
As we progress through the project, we will be open sourcing our software, electrical, and mechanical components, as well as providing the appropriate documentation such that others may follow along.
The Fun Part
Unfortunatly, much of the planning for the electrical and mechanical components are a little in the air, as my mainboard has not shipped yet, and our original RC car gave up the ghost. Nonetheless, here’s a brief overview of my TinyKart:
Components
- 1/10 RC-car, likely a Traxxas Slash
- Rpi Pico as our ESC and servo interface
- Framework Mainboard as onboard computer
- LD06 2D LiDAR (connected over UART to PC)
- BNO055 9dof IMU (connected over UART to PC)
- 2s LiPO dirty power
- 6s(?) LiPO for control power
- Garage door opener relay as e-stop
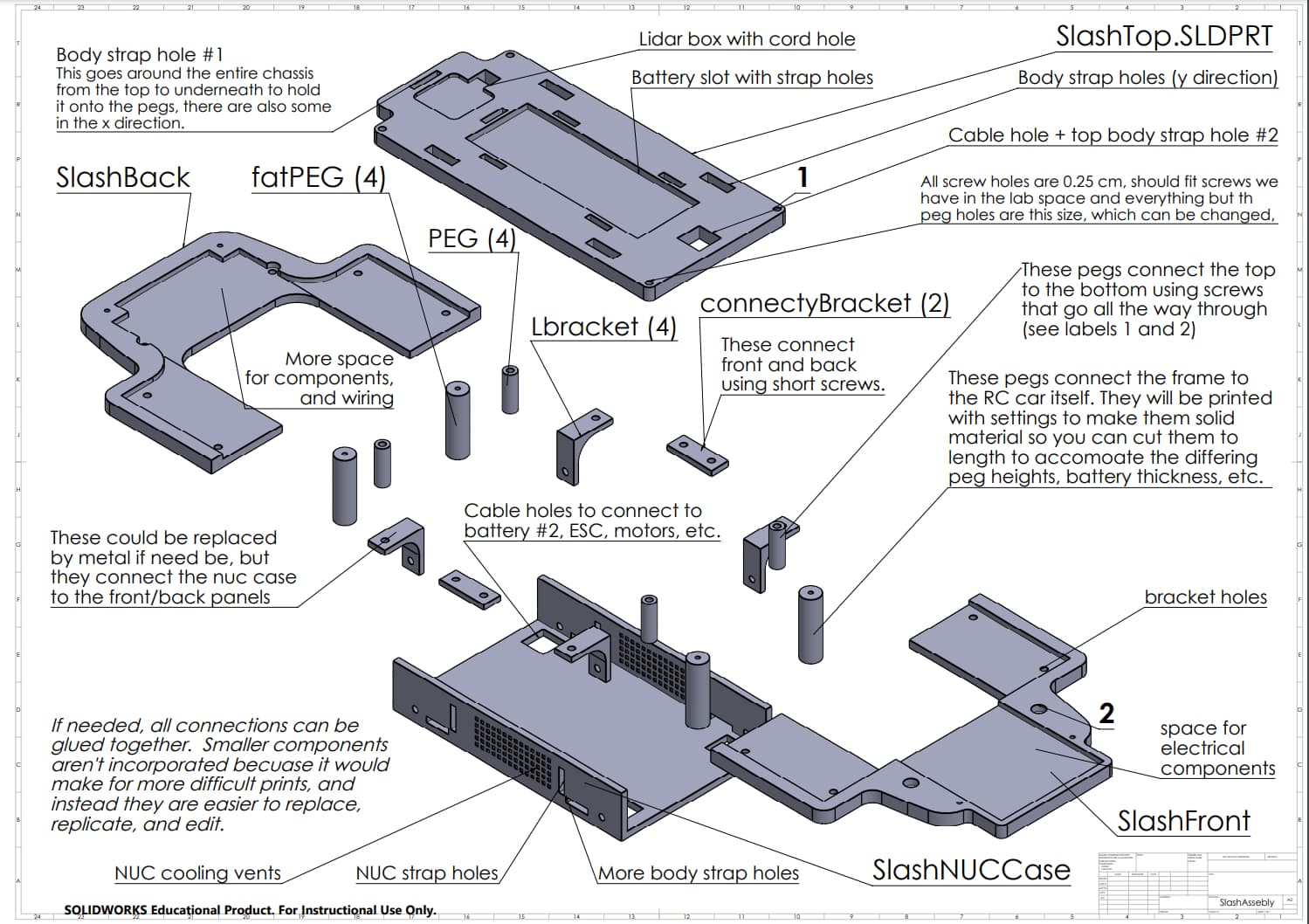
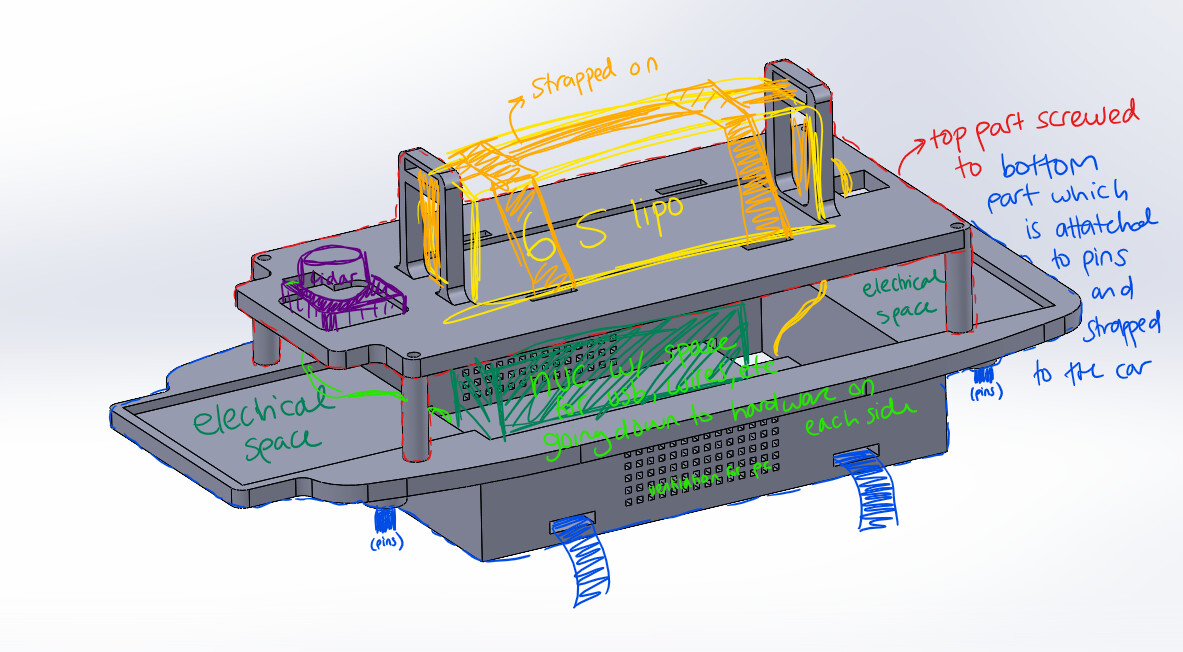
Layout
Here was the original layout for the old car, subject to change now that we can no longer use that one (replace any instance of NUC with mainboard, we use NUC as a synonym for ‘small PC’ for some reason).
Software
The software is split into two peices, that peice that runs on the pico, and the rest on the mainboard.
The pico component will host a uart interface, react to commands, and then control the steering servo and ESC over PWM. I’ve used this project as an excuse to try out embedded Rust, which is something I’ve quite enjoyed using.
The mainboard side of things will run ROS2 Galactic on Ubuntu 20.04. I’m quite familiar with ROS2 from past work, so I’m currently planning on using Navigation2 for path planning, primarily for simplicity as we get the rest of TinyKart off the ground. Another benifit of ROS2 is Gazebo, which should provide a nice simulation enviornment for tuning nav while the electrical gets worked on.
“Power”, or “The Hard Part”
The biggest question that comes with using the mainboard is power. This is because I need to go through USB-C PD, rather than just a plain DC barrel, which is what we tradionally use. I’ve seen conflicting reports of external battery power needs across this fourm, but the consensis seems to be somewhere between 45 and 100w - quite the range. To actually get the power from the LiPO, I’m looking into first running it though a low voltage cutoff circut, then through the estop, then finally thorugh something like this board I found on amazon. Unfortunatly, these seem quite power limited, so I would appreciate some feedback on a better way to do this. This is honestly pushing my knowlege of electronics, so I’d like to give some credit to my teammates, who are helping design much of the electrical.
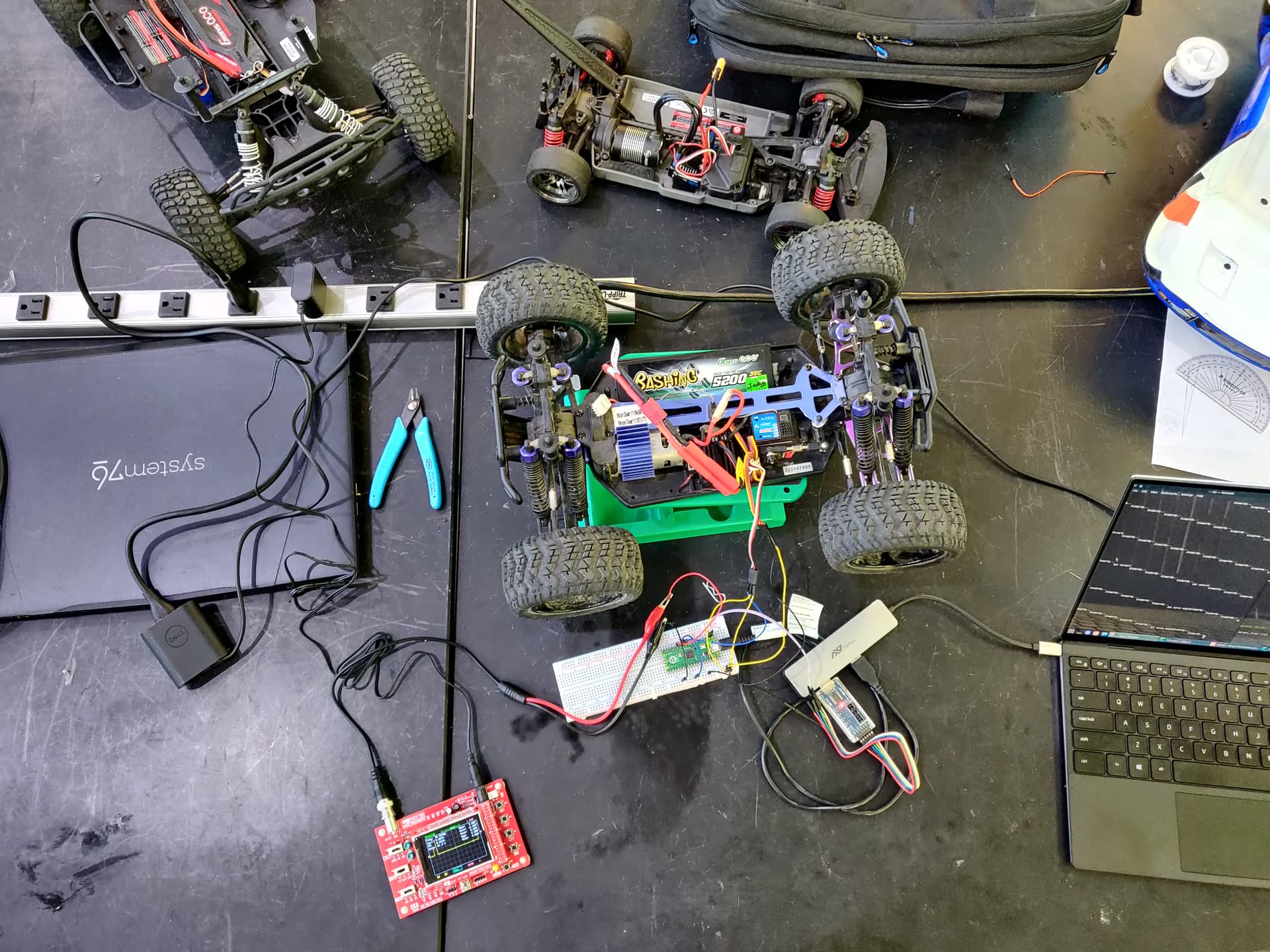
A demo
Finally, here’s a demo of the microcontroller control, which is the first peice of code I’ve got completely done:

And a small explaination of how I got that set up:

I’ll be updating this thread as I progress, as well as posting links to components as we open source them for refrence.
Thanks again to Framework for this oppertunity!